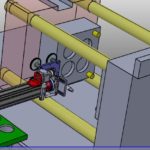
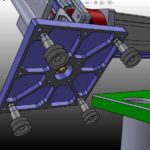
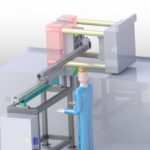
Robot prelievo automatico da stampo
Il sistema proposto garantisce il prelievo dei 4 tappi stampati, direttamente dalla piastra mobile dello stampo in fase di apertura. I tappi prelevati vengono poi indirizzati in una zona di presa per essere impilati in apposite canne di impilaggio. Dalle 4 canne di impilaggio un operatore può facilmente estrarre un determinato numero di tappi formanti una pila. È possibile integrare un sistema di controllo del numero di tappi per evitare che l’operatore debba controllare l’esatto numero di tappi contenuti in una pila. È possibile integrare una giostra rotante per un maggiore accumulo di pile durante le ore di lavorazione , per distanziare i tempi di presenza operatore sulla macchina.